
�������: 136-150 ���鵽��֪ʶҪ�� �Զ�������Ӧ������ؼ�¼391�� . ��ѯʱ��(2.557 ��)

������Ϣ�Ƽ���ѧ�ٻ��й�ָ�������ѧ��Ƽ��������Ƚ���ͼ��
������Ϣ�Ƽ���ѧ �й�ָ�������ѧ�� �Ƽ����� ���Ƚ� ���������ܸ�֪ Ⱥ��Э�� ���ܿ��Ʒ���
2020/12/17
2020��9��24�գ��й�ָ�������ѧ��CICC��ѧ�������佱������ڰ˽��й�ָ�ӿ��ƴ��ͬ���ڱ������һ������ľ��С����Զ���ѧԺ�����ؽ��ڡ�����������ǣͷ����У��Ϊ��һ��λ��ɵġ����Ӳ�ȷ�������µĻ��������ܸ�֪��Ⱥ��Э���������ܿ��Ʒ�������Ŀ�ɹ���CICC�Ƽ��������Ƚ�������Ŀ�о��������硢���ѧϰ��ǿ��ѧϰ�����������ٵ����۽���������뵽Ⱥ�ǻ����˵����ܸ�֪��Эͬ���������ܾ����У���Ч���...
�㽭��ѧ���ƿ�ѧ�빤��ѧԺѧ���ٻ��ʮ�����Ŀ��˹����ܼ���������һ�Ƚ���ͼ��
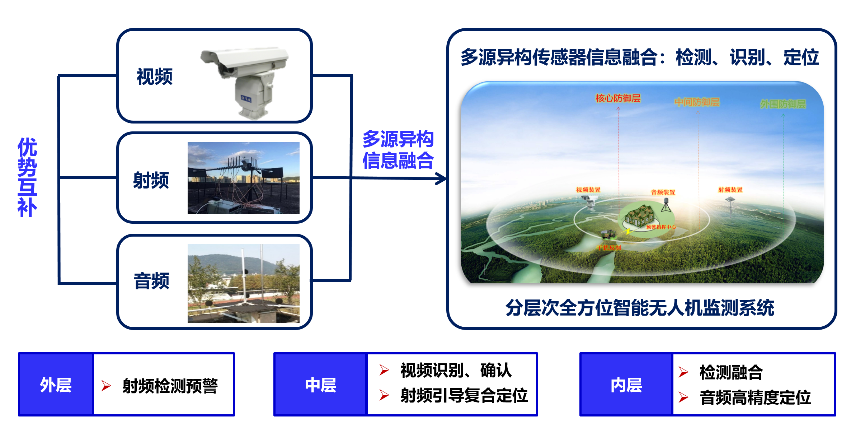
��ʮ�� ���Ŀ� �˹����ܼ��� ������ һ�Ƚ� �Ϳշ����� ���ܼ��
2021/1/14
2020��12��10�գ�2020��ȵ�ʮ�����Ŀ��˹����ܿ�ѧ��������������ʽ��¯���㽭��ѧʷ�ι����»���������塢�������½��桢�������Ŷӵijɹ����Ϳշ��������ܼ��ؼ�������Ӧ�á����ٻ��ʮ�����Ŀ��˹����ܼ���������һ�Ƚ����óɹ�ͨ����Ƶ����Ƶ����Ƶ�����ںϼ������ԵͿշ����������˼�⡢ʶ��Ͷ�λ�����ּ����ﵽ��������ˮƽ��
2020��11��7�գ����й��Զ���ѧ�����죬ͬ�ô�ѧ���Ϻ�������������ϵͳ��ѧ���ijа��2020�й��Զ���������Ϻ����ʻ������Ŀ�Ļ�����Թ����Զ�������Ľ�3000���Ƽ������߲μ����»��顣�����ڼ䣬��ϢѧԺ����Ұ�������С��Ż��⡢������Ʋ��ϵȽ�ʦ��ɵ���Ŀ������Դ������Эͬ���Ƽ�����װ����ϵͳ�����2020����Զ���ѧ��Ƽ�����һ�Ƚ���

�й���ѧԺ�����Զ����о����������ͻ�վʽROVϵͳԲ�����3000�����պ��ԣ�ͼ��
���ͻ�վʽ ROVϵͳ 3000�� ���պ���
2020/12/16
���գ����п�Ժ�����Զ����о������Ƶ����վʽ����ROVϵͳ����������DZˮ�������ء�¹��š���λ����½���ϣ�Բ�����3000�����պ������顣�����պ����У�������DZˮ����3000����˳��������������ȡ��˶��뾶�����κ�����˫ģʽ�µĹ��ܺͼ���ָ����֤������С����������ʵ�����������룬�������е�С��5����ģ�黯��е�ֳɹ����Ż����˱�ʶ������������ﲶ��������DZˮ������ͻ����˫�˶�ģʽģ...
�й���ѧԺ�����Զ����о����������ܶ��ߡ������������DZ��ҵ
�й���ѧԺ�����Զ����о��� �ܶ��ߺ� ���� ��DZ��ҵ
2020/12/16
���գ� ���ܶ��ߡ���ȫ��������DZˮ��˳�����������DZ���飬������10909���й�������DZ�¼�¼����������������ɺ��������DZ��ҵ����ȡ�˴���������ʵ���Ԩ������Ʒ��11��28�գ��й���������ǡ�������ϯ�������ί��ϯϰ��ƽ����ף�ء��ܶ��ߡ���ȫ��������DZˮ���ɹ���������Բ�ʤ�����������ܶ��ߡ����ǡ�ʮ���塱�����ص��з��ƻ�����ؼ�������װ�����ص�ר��ĺ��������������й��������ŵ��ߩ�����...
���գ��������й���ѧԺ�����Զ����о���������ѧ�����ص�ʵ���������ѧϰ���������о���ȡ������Ҫ��չ���Ժ�־�о�ԱΪ��һ���ߡ���ʿ����˼ȪΪ�ڶ����ߵ������о��ɹ�Depth selection for deep ReLU nets in feature extraction and generalization���շ����ڹ����˹�������ģʽʶ��ģʽ�����ڿ�IEEE Trans. on Patter...

�й���ѧԺ�Զ����о���������AI�����������Ӿ�������Ĺ�����һ����ͼ��
�й���ѧԺ�Զ����о��� ������ AI���� �Ӿ�
2020/10/19
���գ��й���ѧԺ�Զ����о����Ͼ��˹�����оƬ�����о�Ժ���������˾�пƷ���֪������ɵ�AIӰ���Ŷ�ƾ���ɫ��AIӰ������������ECCV 2020 AIM��ս���У�ն��ISP�������黯�����������ֱ��ʡ����չ��������Ĺ�һ�ǣ���CVPR 2020 NTIRE��ս���У����ͼ��ȥ�롢ͼ��ȥĦ������������һ������Ϊͼ���������Ӱ����������֮һ������AIM 2020��Advanced Intellige...
�Ϻ��д�����������Ⱦ�����ص�ʵ���ҳ½�������Ŷ��з���PM2.5�˹����ܼ�������ǽ�������ʹ�ҵ������
�˹����ܣ���⣻�����ǣ�����������
2021/10/29
Ϊ�˿��١����жϿ��������ﶾ�ԣ��½����Ŷ��ڹ��һ���ί�ش�����������������룩��Ŀ�����£���ʱ5�꣬�з��ɹ��˹����ܻ�������ܽ�Ũ�ȸ���ϵͳ����������ﶾ�Լ�������ǡ���̨���������з��豸����PM2.5�ɼ����ܳ�Һ�Ʊ�ģ�顢��ѧ�ɷַ��������Լ��ģ������ģ�鹹�ɣ�ʵ����30�����ڶԴ������������ﶾ�Ե�����ʵʱ���ܲ��������ڽ��Ĵ����������ͽ���ЧӦ���۾�����Ҫ��ָ�����á� ���ܣ��½����Ŷӽ�...

ͯʫ����������100���������ߡ�����-ͯʫ���й��Զ�����������������ʽ���廪��ѧ���У�ͼ��
ͯʫ������ ���� 100���� �й��Զ��������� ������ʽ �廪��ѧ
2020/9/10
2020��9��5�գ���ӭ�ӵ�36����ʦ�ں��Զ���ϵ��ϵ50����֮�ʣ��廪��ѧ�Զ���ϵ��������¥¡�ؾ��С�ͯʫ����������100�������ᡱ�ߡ�����-ͯʫ���й��Զ�����������������ʽ����У�����գ���ί��ί��������ϯ���ң����ӿƼ���ѧУ�����Զ���ϵ1980��ϵ�����£�ѧУ���쵼����Ӣ�������ġ������ɣ�������ͯ�������¶�������ܴ�Ժʿ����Ӣ��Ժʿ����Ӧ���о�Ա��ϯ����ᡣ�������ߵȽ���˾�����������߶��棬...
���пƼ���ѧ�˹��������Զ���ѧԺѧ�����й�����������ս�����ٻ�Ѽ���ͼ��
���пƼ���ѧ�˹��������Զ���ѧԺ �й��������� ��ս�� �Ѽ�
2020/9/17
2020��8��28�գ�2020���ʮ�Ľ�ȫ����ѧ���������ӱ����й�����������ս����CIMC�������Ļ���������ʸ�����������ȫ���ܾ�����2���µĽ������̣���У�˹��������Զ���ѧԺѧ���ٻ�óɼ�����ն��ȫ���ܾ����صȽ���һ�Ƚ��Ͷ��Ƚ���һ��Դ�����ί����5�µ�������֪ͨ�������˹��������Զ���ѧԺ��ѧ���Ƽ����»����������Զ����Ŷ�������־�ա���Ф�顢Ф����ָ����ʦ������Ա��֯ͬѧ�μ�����ѧϰ��ʵѵ...
�й������DZ���|�й���ѧԺ������Ϣ�����о�Ժ���������ⷢ��ֲ�����溦ң�м����Ԥ��ϵͳ
ũ���ﲡ�溦 ֲ�����溦ң�м�� �Ƽ���������
2022/3/17
"����ʳΪ��"������������ʳ��Ĺ�ϵ����������ʳ������ܸ��������������ʳ����Ը����㣬����һ�����ҿɳ����Է�չ�Ļ�����ũ������������벻����ѧ�ĿƼ������������Լ�����ҵ����������ܸ���ũҵ�����Ļ�е�豸��ũ���ﲡ�溦�����Ǵ�����Σ������С�ũ���ﲡ�溦���ҹ�����Ҫũҵ�ֺ�֮һ������������ࡢӰ���ʱ���������ֵ��ص㣬�䷢����Χ�����س̶ȶ��ҹ����á��ر���ũҵ����������ش���ʧ���ҹ�ũ...

�廪��ѧ������������������ʿ����Ƹ����Ժ���¡�������ʷ�о��ݹ�Ա��ͼ��
�廪��ѧ ������ ������ ��ʿ�� ����Ժ ������ʷ�о��� ��Ա ������� �Զ��� ����
2020/8/25
2020��8��19�գ��й��������ξֳ�ί������Ժ�������ǿ����Ƹ�εĹ���Ժ�������ҫ�������ǡ���ƽ���������������������⡢���������������Զ������ͮ����Ө�Һ�������ʷ�о��ݹ�Ա����������������ʿ���������ء��ï�������硢�μ�Ӣ�䷢Ƹ�顣���У��廪��ѧ����ѧԺ���������Զ���ϵ��������Ƹ����Ժ���£�����ѧԺ��ʿ����Ƹ������ʷ�о��ݹ�Ա����ͬ�����»�Ƹ��ʦ���廪��ѧĿǰ����5λ��ʦ���ι���Ժ���£�4...

�й���ѧԺ�Զ����о������������ܼ����Ŷ����֪ʶ�������ں������Ķ��α�����Эͬ�����㷨��ͼ��
�й���ѧԺ�Զ����о��� ���������ܼ��� ֪ʶ������ �ں����� ���α��� Эͬ�����㷨
2020/8/24
������˱�Ӷ��α�����Эͬ����������ָ�ɶ���������������ɵĻ����˱�ӣ������ÿռ��¼�Ҫ�����ܵر�����Ҫ��Ķ��Σ���Ҫ�����뻷���ϰ��P���������˷�����ײ�������յ���Ŀ�ĵء���������Ե�������˵ĸ�֪����������Ͷ�����˱��Эͬ�������нϸߵ�Ҫ�ɹ㷺Ӧ������ೡ���У������ִܲ��е�Э�����ˡ������뺣����������̽��ȵȡ�����Ķ�����˱�Ӷ��α�����Эͬ�����㷨ͨ�����Է�Ϊ����ģʽ�л�����...

�Ϻ���ͨ��ѧ������Ϣ���������ѧԺ��λ���ڵ�ѡ2020��ŷ��ѧԺԺʿ��ͼ��
�Ϻ���ͨ��ѧ������Ϣ���������ѧԺ ��λ���� 2020�� ŷ��ѧԺ Ժʿ ������ֲ�ʽ���� �Զ���
2020/8/14
���գ�ŷ�����ĺ���Ȼ��ѧԺ��Academia Europaea����ʽ�����½�Ժʿ��������Ժ�������ѧ�빤��ϵ���ڹ��������Զ���ϵ��ϯ���ڰ���ɭ���ֿ�˹�أ�Anders Lindquist����ѡ2020��ŷ��ѧԺԺʿ���˴ι����������緶Χ�ڵ�361λѧ�߽������롣

�й���ѧԺ�Զ����о������ǿ��ѧϰ�Ŷ�����������ǿ��ѧϰ��δ֪��������̽��������ͼ��
�й���ѧԺ�Զ����о��� ���ǿ��ѧϰ δ֪���� ����̽������
2020/8/24
�п�Ժ�Զ��������ǿ��ѧϰ�Ŷ������һ�ֻ������ǿ��ѧϰ��δ֪��������̽���㷨���ܹ�ʹ��������û������Ļ���������̽������ʵʱ����������ͼ�����ķ�����2020��IEEE TNNLS��[1]��δ֪����̽����ָ��������û���κ�����֪ʶ������£���һ���µĻ�����ͨ���ƶ�����������������ͼ�Ĺ��̣���ӳ�˻�����ϵͳ���������������ͶԻ�������Ӧ�ԣ��ǻ����������һ���ȵ����⡣����ʵ�������Ź㷺��Ӧ�ó��������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...