
ЫбЫїНсЙћ: 1-15 ЙВВщЕНЁАПижЦПЦбЇгыММЪѕ еОЁБЯрЙиМЧТМ40Ьѕ . ВщбЏЪБМф(0.265 Уы)
2020Фъ12дТЃЌЁАаТвЛДњШЫЙЄжЧФмМггЭеОГЩЬзММЪѕЁБе§ЪНШыЮЇМЏЭХЙЋЫОЁАЪЎЬѕСњЁБПЦММЯюФПЃЌгЩЯњЪлЙЋЫОШЮзщГЄЕЅЮЛЃЌББОЉЪЏгЭЁЂКўФЯЪЏгЭЁЂАВЙЄдКШЮзщдБЕЅЮЛЃЌЙВЭЌПЊеЙЯюФПЙЅЙиЁЃЯюФПзщПЊеЙЯжГЁЪЕМЪгІгУЧщПіЕїбаЃЌзщжЏзЈМвТлжЄММЪѕТЗЯпМАММЪѕЗНАИЃЌНсКЯЪЕМЪгХЛЏЕїећЯрЙиВЮЪ§жИБъЃЛМАЪБПЊеЙЯюФПМЏжазмНсЃЌаЕїИїГЩдБЕЅЮЛЭъГЩЯюФПЙЄзїБЈИцЁЂММЪѕБЈИцЁЂгІгУБЈИцЕШМјЖЈВФСЯЃЌЪсРэЯюФПаЮГЩЕФжЊЪЖВњШЈЧщПіЃЌШЗБЃЯюФПЫГРћЭЦНјЁЃ
НќШеЃЌжаЙњКЫЙЄвЕЖўШ§НЈЩшгаЯоЙЋЫОСЌдЦИлЯюФПВПгыжаКЫЩшМЦКИНгбаОПЫљЙВЭЌбажЦЕФШЋЯЕСаЗчЙмдЄжЦздЖЏКИЛњЦїШЫЙЄзїеОЪзДЮдкЬяЭхКЫЕч7ЁЂ8КХЛњзщГЩЙІТфЕигІгУЁЃ
ЁЖЁР800kVЬиИпбЙЛЛСїеОЛЛСїБфCAFSСЊЖЏПижЦЯЕЭГгІгУЗНАИбаОПЁЗЃЈЭМЃЉ
ЬиИпбЙЛЛСїБф бЙЫѕПеЦјХнФУ№Л№ЯЕЭГ СЊЖЏПижЦЯЕЭГ
2023/6/19
бЙЫѕПеЦјХнФУ№Л№ЯЕЭГЃЈCAFSЃЉОбщжЄПЩзїЮЊЬиИпбЙЛЛСїБфУ№Л№ЗНАИЃЌе§дкЙњЭјЙЋЫОЬиИпбЙЛЛСїеОЭЦЙугІгУЁЃБОЮФНсКЯЙњЭјЙЋЫОЕфаЭЁР800 kVЬиИпбЙЛЛСїеОЯюФПЃЌЬсГіЬиИпбЙЛЛСїеОCAFSСЊЖЏПижЦЯЕЭГЕФЙІФмХфжУЁЂЙЄзїСїГЬЁЂЭтВПЯЕЭГНгПкЗНАИЃЌЖдКѓајЬиИпбЙЛЛСїеОCAFSСЊЖЏПижЦЯЕЭГЕФЩшМЦЁЂгІгУОпгаНшМјзїгУЁЃ

ОлНЙШЫЙЄжЧФмгыздЖЏМнЪЛММЪѕЃЌCAAIдЦТлЬГЃЈФЯОЉеОЃЉГЩЙІОйАьЃЈЭМЃЉ
ШЫЙЄжЧФм здЖЏМнЪЛ CAAIдЦТлЬГ ФЯОЉеО
2022/10/9
2021Фъ12дТ30ШеЃЌгЩжаЙњШЫЙЄжЧФмбЇЛсжїАьЃЌCAAIжЧФмМнЪЛзЈЮЏЛсЁЂНЫеФЯОЉЩњЬЌПЦММЕКОМУПЊЗЂЧјЙмЮЏЛсЁЂжааТФЯОЉЩњЬЌПЦММЕКПЊЗЂгаЯоЙЋЫОГаАьЕФЁАCAAIдЦТлЬГЃЈФЯОЉеОЃЉЁЊЁЊШЫЙЄжЧФмгыздЖЏМнЪЛММЪѕЁБГЩЙІдкЯпОйАьЁЃгыЛсМЮБіЙВЭЌЬНЬжСЫШЫЙЄжЧФмММЪѕЕФЗЂеЙЃЌЬиБ№ЪЧгыздЖЏМнЪЛММЪѕЕФЩюЖШШкКЯгыЙуЗКгІгУЃЌЮќв§РлМЦГЌ27ЭђШЫДЮдкЯпВЮЛсЁЃ

2021Фъ12дТ11ШеЯТЮчЃЌгЩжаЙњШЫЙЄжЧФмбЇЛсжїАьЁЂCAAIЖЏЬЌЙцЛЎгыжЧФмздЪЪгІбЇЯАзЈвЕЮЏдБЛсЃЈГяЃЉГаАьЕФдЦТлЬГЃЈЩђбєеОЃЉГЩЙІОйАьЁЃРДздЙњФкЭтжЊУћИпаЃЕФ6ЮЛзЈМвбЇепЮЊДЫДЮТлЬГзїЛсвщБЈИцЃЌЮќв§СЫ568780ШЫДЮдкЯпЙлПДЃЌЦфв§ШЫШыЪЄЕФФкШнЛёЕУСЫЙуДѓЪмжкЕФвЛжТКУЦРЁЃ
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљПеМфЛњЦїШЫММЪѕгаСІБЃеЯПеМфеОИпЮЂжиСІПЦбЇЪЕбщЫГРћПЊеЙ
ИпЮЂЙёаќИЁЪЕбщ ЛњЦїШЫММЪѕ ИпЮЂжиСІПЦбЇЪЕбщ ЪгОѕЕМКНзгЯЕЭГ
2021/9/17
ИпЮЂЙёаќИЁЪЕбщЯЕЭГздЖЏЫјНє/ЪЭЗХЛњЙЙгыЪгОѕЕМКНзгЯЕЭГЃЌжївЊЪЕЯжЖдаќИЁЪЕбщЬЈЗЂЩфЙ§ГЬЕФЫјНєЁЂдкЙьЕФздЖЏНтЫјгыжиИДЫјНєЃЌвдМАаќИЁЪЕбщЬЈВеФкЗЩаазджїЕМКНЕШЙІФмЃЌЪЧШЗБЃаќИЁЪЕбщЯЕЭГЭъГЩПЦбЇЪЕбщЕФКЫаФБЃеЯЯЕЭГЁЃ здЖЏЫјНєЪЭЗХЛњЙЙЃЌВЩгУзѓгвСНВр8ЕуЁАМаГжЪНЁБЙЙаЭЃЌОпгадЫЖЏЗЖЮЇДѓЁЂеМгУПеМфаЁЁЂГадиФмСІИпЁЂЕЅЕуПЩЕїећЁЂдЫЖЏОЋЖШИпЕШЬиЕуЁЃШыЙьКѓЃЌздЖЏЫјНєЪЭЗХЛњЙЙИљОнвЃВтжИСюЃЌЪЕЯжздЖЏЫјНєЁЂздЖЏЪЭЗХМАжИЖЈЮЛжУзЄЭЃЃЌЛњ...
ФкУЩЙХПЦММДѓбЇаХЯЂЙЄГЬбЇдКбЇзгдк2021ФъRMULЛњМзДѓЪІИпаЃСЊУЫШќЃЈЮїББеОЃЉ еЖЛёвЛЕШНБ
ФкУЩЙХПЦММДѓбЇаХЯЂЙЄГЬбЇдК RMULЛњМзДѓЪІ ИпаЃСЊУЫШќ ЛњЦїШЫ
2023/2/27
гЩЙВЧрЭХжабыжїАьЃЌДѓНЎЗЂЦ№ЁЂЮїАВНЛЭЈДѓбЇГаАьЕФЕкЖўЪЎНьШЋЙњДѓбЇЩњЛњЦїШЫДѓШќRoboMasters2021ЛњМзДѓЪІИпаЃСЊУЫШќЃЈЮїББеОЃЉЃЌгк2021Фъ4дТ5ШедкЮїАВЪаЮїВПдЦЙШдЦЩаЛсвщжааФдВТњТфФЛЁЃШќЪТЮќв§СЫАќКЌФкУЩЙХПЦММДѓбЇвдМАЮїАВНЛЭЈДѓбЇЁЂЮїББЙЄвЕДѓбЇЁЂТНОќБпКЃЗРбЇдКЕШжкЖрИпаЃВЮгыЃЌШќЪТЙВГжајШ§ЬьЁЃФкУЩЙХПЦММДѓбЇРзіЊеНЖгЙ§ЙиеЖНЋЃЌВЂзюжеШЁЕУШќЧјЗЧМзМЖвЛЕШНБЕФКУГЩМЈЁЃ
ЫЎРћВПФЯОЉЫЎРћЫЎЮФздЖЏЛЏбаОПЫљвЛЬхЛЏЯсЪНЃЈАЫВЮЪ§ЃЉЫЎжЪдкЯпМрВтеОбажЦЯюФПЫГРћЭЈЙ§бщЪе
вЛЬхЛЏЯсЪН ЫЎжЪдкЯпМрВт
2022/9/5
2021Фъ3дТ26ШеЃЌгЩЫЎРћВПФЯОЉЫЎРћЫЎЮФздЖЏЛЏбаОПЫљбаОПжааФГаЕЃЕФ2018ФъжабыМЖЙЋвцадПЦбадКЫљЛљБОПЦбавЕЮёзЈЯюзЪН№жиДѓЯюФПЁАвЛЬхЛЏЯсЪН(АЫВЮЪ§)ЫЎжЪдкЯпМрВтеО(ЯЕЭГ)бажЦЁБбщЪеЛсдкФЯОЉДфЦСЩНБіЙнЫГРћейПЊЁЃЛсвщгЩФЯОЉЫЎРћПЦбЇбаОПдКПЦбаЙмРэДІжїГжейПЊЃЌЬЋКўСїгђЙмРэОжЫЎЮФОжЁЂНЫеЪЁЫЎЮФЫЎзЪдДПБВтОжЁЂЫЎРћВПЫЎЮФвЧЦїМАбвЭСЙЄГЬвЧЦїжЪСПМьВтВтЪджааФЁЂФЯОЉаХЯЂЙЄГЬДѓбЇЕШЕЅЮЛзЈМвВЮМгбщЪеЁЃ

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљбажЦаТаЭЛљеОЪНROVЯЕЭГдВТњЭъГЩ3000УзбщЪеКЃЪдЃЈЭМЃЉ
аТаЭЛљеОЪН ROVЯЕЭГ 3000Уз бщЪеКЃЪд
2020/12/16
НќШеЃЌгЩжаПЦдКЩђбєздЖЏЛЏбаОПЫљбажЦЕФЩюКЃЛљеОЪНаТаЭROVЯЕЭГЁЊЁЊТўгЮепЧБЫЎЦїЃЌДюдиЁАТЙСыКХЁБЖрЮЛЕузХТНЦїЩЯЃЌдВТњЭъГЩ3000УзМЖбщЪеКЃЩЯЪдбщЁЃдкбщЪеКЃЪджаЃЌТўгЮепЧБЫЎЦїдк3000УзКЃЕзЫГРћЭъГЩСЫзюДѓЙЄзїЩюЖШЁЂдЫЖЏАыОЖЁЂИЁгЮКЭХРааЫЋФЃЪНЯТЕФЙІФмКЭММЪѕжИБъбщжЄЃЌЛљгкаЁаЭЩљФЩв§ЕМЪЕЯжСЫзджїЛиЮыЃЌРћгУздбаЕФаЁаЭ5ЙІФмФЃПщЛЏЛњаЕЪжГЩЙІВМЗХЛиЪеСЫБъЪЖЮяЃЌВЂЭъГЩСЫЩюКЃЩњЮяВЖЛёЁЃТўгЮепЧБЫЎЦїбажЦЭЛЦЦСЫЫЋдЫЖЏФЃЪНФЃ...

жаЙњвЧЦївЧБэЭј|2050ИіЕиБэЫЎздЖЏМрВтеОМЦЛЎНёФъНЈЩшЭъБЯЃЈЭМЃЉ
ЛЗОГМрВт ЁАВЩВтЗжРыЁБ ЫЎжЪздЖЏМрВтЯюФП ЕиБэЫЎМрВт
2022/3/24
2018Фъ1дТ31ШеЃЌЛЗОГБЃЛЄВПОйаааТЮХЗЂВМЛсЃЌЖдЮвЙњЕФЛЗОГМрВтЙЄзїзіСЫНщЩмКЭзмНсЃЌВЂЖдЯТвЛВНЕФЛЗОГМрВтжиЕузіСЫЙцЛЎЁЃИљОнЙцЛЎЃЌЮвЙњМЦЛЎдкНёФъФкЭъГЩ2050ИіЕиБэЫЎПМКЫЖЯУцЫЎжЪздЖЏМрВтеОНЈЩшЁЃОЭдкЭЌвЛЬьЃЌжаЙњЛЗОГМрВтзмеОГтОозЪ16.8вкдЊЖдЙњМвЕиБэЫЎздЖЏМрВтЯЕЭГНЈЩшМАдЫааЮЌЛЄЯюФПНјааЙЋПЊеаБъЁЃ
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљжЦЖЈЕФПеМфеОЙњМвБъзМе§ЪНЗЂВМ
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљ ПеМфеОЙњМвБъзМ
2018/1/10
НќШеЃЌЙњМвБъзМЛЏЙмРэЮЏдБЛсЭЈЙ§ЙйЗНЭјеОЗЂВМСЫЁЖжаЛЊШЫУёЙВКЭЙњЙњМвБъзМЙЋИцЃЈ2017ФъЕк32КХЃЉЁЗЃЈhttp://www.sac.gov.cn/gzfw/ggcx/gjbzgg/201732/ЃЉЃЌгЩжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЧЃЭЗжЦЖЈЕФСНЯюПеМфеОЙњМвБъзМЁЖGB/T 35436-2017ПеМфеОПЦбЇЪЕбщЙёБъзМФЃПщНгПкЩшМЦЙцЗЖЁЗЁЂЁЖGB/T 35438-2017ПеМфеОПЦбЇЪЕбщЙёЦјвКПьЛЛНгЭЗЙцЗЖЁЗЃЌВЮгыгЩжаЙњ...
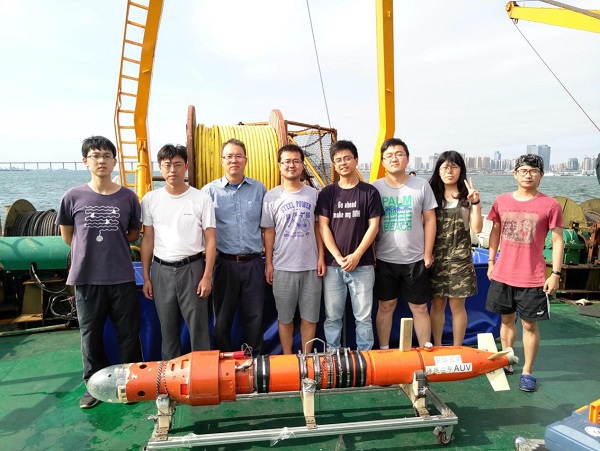
еуНДѓбЇаХЕчбЇдКбажЦЕФЫЎЯТЛњЦїШЫдкФЯКЃГЩЙІгыКЃЕзНгВЕеОЖдНгЃЈЭМЃЉ
еуНДѓбЇаХЕчбЇдК ЫЎЯТЛњЦїШЫ ФЯКЃ КЃЕзНгВЕеО
2017/5/23
2017Фъ5дТ12-16ШеЃЌеуНДѓбЇаХЕчбЇдКгыЛњаЕбЇдКЁЂКЃбѓбЇдКСЊКЯГаЕЃЕФЙњМв863МЦЛЎЁАЩюКЃвЦЖЏЦНЬЈгыКЃЕзЙлВтЭјЗЧНгДЅНгВЕММЪѕЁБПЮЬтдкФЯКЃНјааСЫЫЎЯТЛиЮыЪдбщЁЃЮвдКаьдЊаРИБНЬЪкИКд№ПЮЬтжаЁАЫЎЯТЛњЦїШЫбажЦКЭзджїКНааЛиЮыЕФЙиМќММЪѕЁБбаОПЙЄзїЃЌКЃЪджаЫЎЯТЛњЦїШЫГіЩЋЭъГЩСЫдЄЖЈЕФШЮЮёЃКЫЎЩю50УзКЃгђ10ДЮГЩЙІЛиЮыЃЌЫЎЩю105УзКЃгђдкБШНЯЖёСгКЃПіЯТвВГЩЙІЛиЮыЃЌЪЧЦљНёЮЊжЙЙњФкГЩЙІНјааЕФЙЄзїКЃгђзюЩюЁЂЛиЮыГЩЙІДЮЪ§...
ДѓБлЪЧФГЮфзАеьВьЛњЦїШЫЮфЦїеОЕФжївЊГаСІВПМўгыжиСПРДдДЃЌЮЊМцЙЫИУНсЙЙЕФПЩППадКЭЧсСПЛЏвЊЧѓЃЌЭЈЙ§HyperMeshгыOptiStructЖдЦфНјааСЫгаЯодЊгХЛЏЩшМЦЁЃЪзЯШдЫгУгаЯодЊЗНЗЈЗжЮіСЫдНсЙЙдкШ§жжЕфаЭЩфНЧЯТЃЌдиКЩЖдНсЙЙОВЧПЖШКЭЮЛвЦЕФгАЯьЁЃЦфДЮдкДЫЛљДЁЩЯбЁгУУмЖШИќаЁЕФ6061ТСКЯН№ДњЬцдНсЙЙВФжЪ45ИжНЈСЂаТЕФЭиЦЫгХЛЏФЃаЭЃЌвдЯрЖдУмЖШЮЊЩшМЦБфСПЃЌвдЬхЛ§зюаЁЛЏЮЊФПБъКЏЪ§НјааСЫЭиЦЫгХЛЏЃЌЕУЕНгХЛЏНсЙЙЁЃЭЈЙ§гы...
ЮїАВЕчзгПЦММДѓбЇВЉЪПКѓПЦбаСїЖЏеОЦРЙРЙЄзїЦєЖЏ ЮїАВЕчзгПЦММДѓбЇ7ИіеОЕудкСа
ЮїАВЕчзгПЦММДѓбЇ ВЉЪПКѓПЦбаСїЖЏеО ЦРЙРЙЄзї 7ИіеОЕу
2015/1/17
2015ФъЃЌШЫЩчВПШЋЙњВЉЪПКѓЙмРэЮЏдБЛсНЋдкШЋЙњЗЖЮЇФкПЊеЙВЉЪПКѓзлКЯЦРЙРЙЄзїЁЃЮїАВЕчзгПЦММДѓбЇ ЁАаХЯЂгыЭЈаХЙЄГЬЁБЁАЕчзгПЦбЇгыММЪѕЁБЁАЛњаЕЙЄГЬЁБЁАМЦЫуЛњПЦбЇгыММЪѕЁБЁАЮяРэбЇЁБЁАПижЦПЦбЇгыЙЄГЬЁБЁАОќЖгжИЛгбЇЁБЕШ7ИіВЉЪПКѓПЦбаСїЖЏеОдкБОДЮзлКЯЦРЙРжЎСаЁЃЮЊСЫИќКУЕФПЊеЙДЫЯюЙЄзїЃЌ1дТ14ШеЯТЮчЃЌбЇаЃдкББаЃЧјАьЙЋТЅЕкЫФЛсвщЪвейПЊзЈЬтЛсвщЃЌАВХХВМжУЦРЙРЙЄзїЃЌШЫВХАьжїШЮТЌЫЖжїГжЛсвщВЂзіЙЄзїАВХХЁЃ
ЁАПижЦПЦбЇгыЙЄГЬВЉЪПКѓСїЖЏеОЁБЃЈвдЯТМђГЦЁАСїЖЏеОЁБЃЉвРЭаЩЯКЃНЛЭЈДѓбЇПижЦПЦбЇгыЙЄГЬвЛМЖбЇПЦЃЌИУбЇПЦЪЧЙњМввЛМЖжиЕубЇПЦЃЌВЂНЈгаНЬг§ВПЁАЯЕЭГПижЦгыаХЯЂДІРэЁБжиЕуЪЕбщЪвЁЃ
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...