
�������: 1-8 ���鵽�������˿��� system.����ؼ�¼8�� . ��ѯʱ��(0.516 ��)

A four-legged robotic system for playing soccer on various terrains��ͼ��
��������� ����ѧ ǿ��ѧϰ
2023/6/20
If you've ever played soccer with a robot, it's a familiar feeling. Sun glistens down on your face as the smell of grass permeates the air. You look around. A four-legged robot is hustling toward you,...
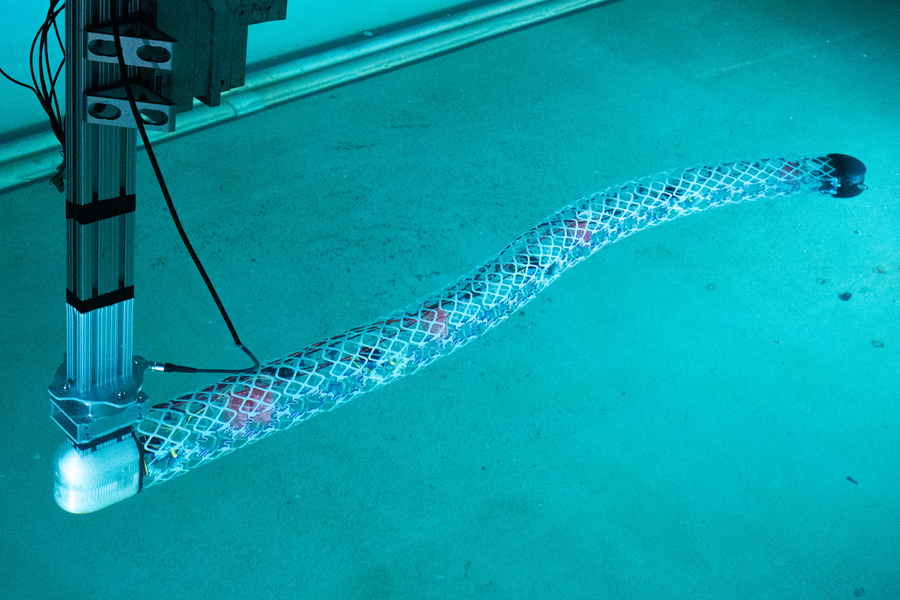
Engineers devise a modular system to produce efficient, scalable aquabots��ͼ��
ˮ�ϻ����� �ظ�Ԫ�� ģ�黯ϵͳ ����ʦ���
2023/6/19
Underwater structures that can change their shapes dynamically, the way fish do, push through water much more efficiently than conventional rigid hulls. But constructing deformable devices that can ch...

Let��s say you wanted to build the world��s best stair-climbing robot. You��d need to optimize for both the brain and the body, perhaps by giving the bot some high-tech legs and feet, coupled with a powe...
Design and Assessment of a Multiple Sensor Fault Tolerant Robust Control System
Multiple Sensor Fault Tolerant Robust Control System
2009/9/7
This paper presents an enhanced robust control design structure to realise fault tolerance towards sensor faults suitable for multi-input-multi-output (MIMO) systems implementation. The proposed desig...
Output Feedback Nonlinear H��-Tracking Control of a Nonminimum-Phase 2-DOF Underactuated Mechanical System
Output Feedback Nonlinear H��-Tracking Nonminimum-Phase 2-DOF Underactuated Mechanical System
2009/9/4
Nonlinear H�� synthesis is developed to solve the tracking control problem restricted to a two degrees-of-freedom (DOF) underactuated mechanical manipulator where position measurements are the only ava...
A Neuro-Fuzzy Reasoning System for Mobile Robot Navigation
Neural networks Fuzzy systems neuro-fuzzy reasoning Mobile robot navigation
2010/1/15
An Autonomous Mobile Robot is an artificially intelligent vehicle capable of traveling in unknown and unstructured environments independently. Among the proposed approaches in the literature to handle...
����MAS(Multi��Agent System)�Ķ������ϵͳ��Э���������ѧ��չ��һ����Ҫ����
�������ϵͳ ��������ϵͳ(MAS) Э���������ѧ
2008/7/18
�����˵�Ӧ�÷�ʽ�����ɲ���ʽ��ԪӦ����ϵͳʽӦ�÷���չ������ʵ��Ӧ�õ���
Ҫ��Ҳ�Ǽ�����չ�ı�Ȼ���ƣ���ؼ������������缼���ķ�չҲΪ����ʵ���ṩ����Ӧ
֧�֣��������Э�����������ȻҲ�Ѿ���Ϊ������ѧ�о���һ���ȵ㣬���У��ֲ�ʽ�˹�
���ܣ�DAI���еĶ������壨������ϵͳ��MAS��Multi-agent System����������������
��Э�������о��ߵĹ�ע�����ļ��ڽ�ʾЭ���������...
The system for simulation and off-line, remote programming of the Mitsubishi Movemaster RV-M1 robot
Automation engineering processes Robotics Simulation
2010/2/9
Purpose: of this paper: The paper presents a concept of a system for off-line programming, simulation and remote supervision of the Mitsubishi Movemaster RV-M1 robot.
Design/methodology/approach: In ...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...