
�������: 1-15 ���鵽����ѧ ��������ؼ�¼81�� . ��ѯʱ��(0.297 ��)

����Ȼ��ͨѶ��������άԺʿ����������ڡ���������������������̬���������½�չ��ͼ��
��Ȼ��ͨѶ ��ά ������ ������ ���� ����̬ ������ �����Ӿ�
2024/4/16
Ϊ��ץ�˹����ܷ�չ���ش�ս�Ի������ҹ��ڡ���һ���˹����ܷ�չ�滮������ȷָ��Ҫ������չ���г����ܵ������Ӿ����м����о�������̬�����Ӿ�Ӳ����Ϊ���й���Ϣ��֪����Ϣ��������Ϣ�洢����˼ά���жϹ��ܵ������������ǹ��������Ӿ���֪��ʵ�ֳ��������Դ���ĺ��IJ��������˹����ܡ������Ӿ������ܼҾӡ��Զ���ʻ����ҵ��⡢����ҽѧ�����ǻ۽�����������ֳ���չDZ������ͳ����̬�Ӿ�ϵͳͨ�������е�Ԫ��...

��Ȼ���У�ϸ�������Ӻ�һЩ����ʹ�����������ĵ��Ծ�˿���д��С������Ͳ�ʳ�����ǵ�����֪�����ȿ��Դﵽ��ţ����Ƥţ������Щ�����ϸ����������ѧ�����������ԣ��������������������������˾��ɵķ��������������Ա��ܹ���������о�ȷ��ϸ����ѧ��������һ���������������ݡ�
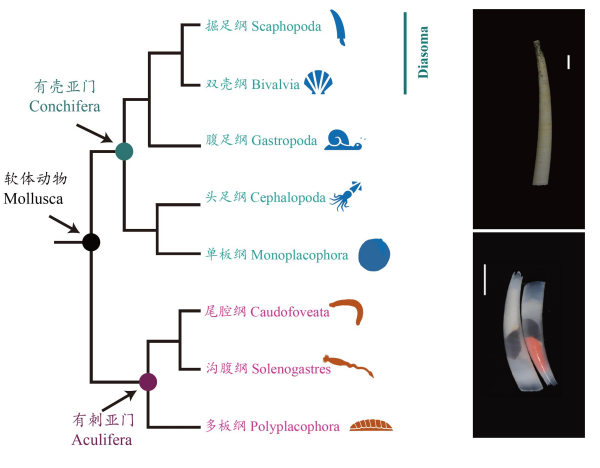
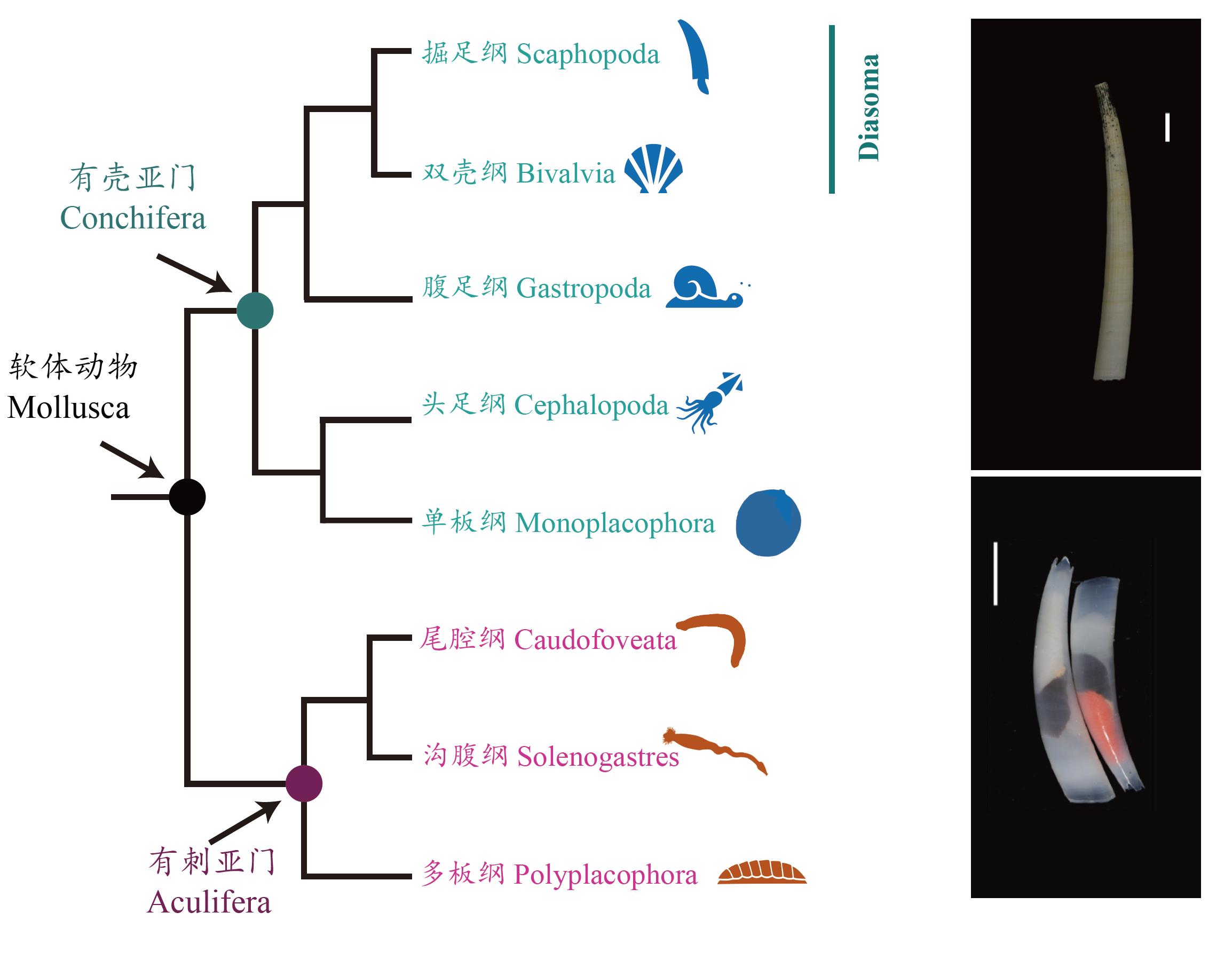
���գ����������ҿ�ѧԺԺ������PNAS�����߷������й���ѧԺ�����о�������������ϵͳ�ݻ�������о��ɹ������о��״ι����˾���٣�Scaphopoda������Ⱦɫ��ˮƽ�����飬����ϵͳ������ѧˮƽ֤ʵ��Diasoma��˵�������-˫�Ǹ�Ϊ����Ⱥ��������˳����������ھ���ٷ����λ�����顣
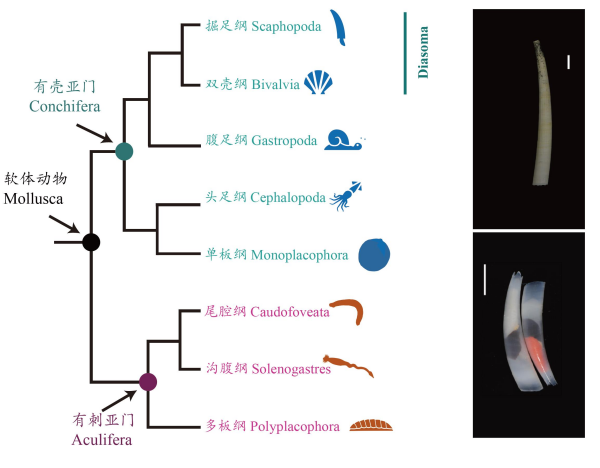
2023��9��27�գ����������ҿ�ѧԺԺ������PNAS�����߷������й���ѧԺ�����о�������������ϵͳ�ݻ�������о��ɹ������о��״ι����˾���٣�Scaphopoda������Ⱦɫ��ˮƽ�����飬����ϵͳ������ѧˮƽ֤ʵ��Diasoma��˵�������-˫�Ǹ�Ϊ����Ⱥ��������˳����������ھ���ٷ����λ�����顣
PNAS������������������ϵͳ�ݻ��½�չ��ͼ��
���嶯�� ϵͳ�ݻ�
2023/10/30
2023��9��25�գ�������ѧԺԺ��PNAS���߿����й���ѧԺ�����о�������������ϵͳ�ݻ�������о��ɹ������о��״ι����˾���٣�Scaphopoda������Ⱦɫ��ˮƽ�����飬����ϵͳ������ѧˮƽ֤ʵ��Diasoma��˵���������-˫�Ǹ�Ϊ����Ⱥ��������˳����������ھ���ٷ����λ�����顣�о����ġ�Scaphopoda is the sister taxon to Bivalvia: Evide...
ˮ�·���������������ˮ��������,ˮ������۲�ȷ�����м��ߵ�Ӧ�ü�ֵ.Ϊ��һ�����������������������������ˮ�»����п���Ч��,���һ������Ӧ³���Ӿ��ŷ����Ʒ���,ʵ�����ڸ����ޱ궨�����еĸ߾�������.����ˮ����ѧģ��,��Ʊ�֤����ѧ�ȶ��Ŀ�����;������Բ������߱궨���̷������ɱ���,������ϲ�������Ӧ�����㷨;���ˮ�����������,�������Ӧ³���Ӿ��ŷ�������,ʵ������ЧӦ�����߲���,��ͨ...

�й���ѧԺ��������������о�����ͨ�������������ﻯʯ�ؽ������¶Ƚ��ɡ�ȫ�����¶����⡱��ͼ��
���� ���嶯�ﻯʯ �����¶� ȫ�����¶�
2022/9/21
ȫ����������Լ1����ǰ����ȫ��������α仯���ֽ�������ů�Ƿ��Ѵﵽ1����������ů�ij̶ȣ��ش���Щ������Ҫ������;���������ʼ�¼�������ģ�⡣���ɵĵ��ʼ�¼��ʾ��������ȫ���������9000-6000�꣩��һ����ů�ڣ�����¶����½�������ҵ�����ٴα�ů��Marcott et al., 2013������������ģ���ʾȫ��������ڹ�ȥ1����������������Liu et al., 2014����Ŀǰ��ѧ����...

ȫ����������Լ1����ǰ����ȫ��������α仯���ֽ�������ů�Ƿ��Ѿ��ﵽ1����������ů�ij̶ȣ��ش����������Ҫ������;����1�����ʼ�¼��2��������ģ�⡣���ɵĵ��ʼ�¼��ʾ������ȫ���������9000-6000�꣩��һ����ů�ڣ�����¶����½�������ҵ���������ٴα�ů��Marcott et al., 2013������������ģ���ʾȫ��������ڹ�ȥ1����������������Liu et al., 2014����Ŀ...
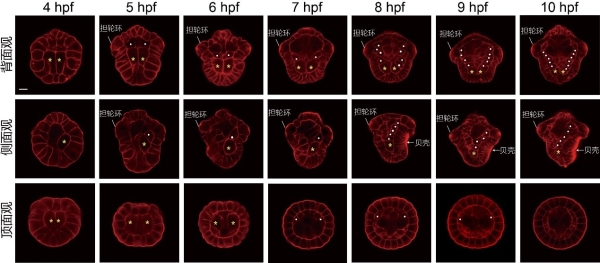
���գ��й���ѧԺ�����о����������о��Ŷ��������������ڷ�����ϸ��ѧ�����о�����ȡ���½�չ�����о��Դ����Ը��������������ұ�Ϊ����ϵͳ��ʾ��ԭ�����ù��̽����߲㲻ͬϸ��Ⱥ��ķ���ģʽ������о��ɹ���Early mesodermal development in the patellogastropod Lottia goshimaiΪ�⣬������Evolutionary Applications��...

���ڵ�ˮ������ᵼ�����صļ�ѹ�� (DCI)��2011 ��������ͳ�ƾּ�¼��DZˮԱ��ƽ��ְҵ��������ȫ��ƽ��ְҵ�����ʵ� 38 ����ˮ�²�����DZˮԱ�ĵ�������֮һ��ʹ��ˮ�»����˼�ץȡ�ִ���DZˮԱ������Ч���ٶ�DZˮԱ�Ľ����˺������ˮ����ҵ��Ч�ʡ�Ȼ����������������Ӧץȡ��Ӧ�����Ļ�����ץȡ��ʼ�վ�����ս�ԡ�
2021��11��10�գ��й���ѧԺ�����о����������о��Ŷ����������ﱳ���ᷢ�����Ʒ���ȡ����Ҫ�о���չ����سɹ�����Ϊ�����ֶ�����ݻ�����֪��BMP2/4-Chordin�����������ﱳ���ᷢ�������о����ķ���������ѧTop�ڿ�����������ѧ���������Molecular Biology and Evolution����

�й���ѧԺ�������������������о����ŬE�Ŷ�JACS����ά����MOF������������װ�������绯ѧִ������ͼ��
��ά���� MOF���� ��������װ ���� �绯ѧ ִ����
2021/4/8
��Ϊһ�����͵����������͵���Ծۺ�����ϣ�EAP�������Ӿۺ���-�������ϲ��ϣ�Ionic polymer-metal composites��IPMC����Ŀǰ�����Ϸ�������������-�ɻ���ϵͳ�����ܹ�ע��ǰ���о����⡣���ⳡ��ѹ�����£����������ڵ缫���淢�������Ƕ��/��Ƕ����������������֮��������ѹ���ݶȣ��Ӷ�����IPMCִ����������-��е�α䡣��ˣ��缫�ĵ绯ѧ�����洢���������Ӵ��������ڸ�...
������ѧ����ѧ�μ� ���ڶ����������
������ѧ ����ѧ �μ� ���ڶ�����嶯��
2020/12/29
������ѧ����ѧ�μ� ���ڶ���������

�й���ѧԺ�����Ƚ������о�Ժ������������̬ѧ�����о�ȡ�ý�չ��ͼ��
�й���ѧԺ�����Ƚ������о�Ժ ��������� ��̬ѧ �����о�
2020/7/29
���գ��й���ѧԺ�����Ƚ������о�Ժ���������������������о�Ա�Ŷӵ���������������̬ѧ���㷽����о�ȡ���½�չ������о������Optimal Design of Soft Pneumatic Bending Actuators Subjected to Design-Dependent Pressure LoadsΪ�ⷢ����IEEE/ASME Transactions on Mechatroni...

���գ��й���ѧԺ�����о��������¼�ƺ������������������ϵͳ�ݻ��о����������Ϸ���ѧ������������������������ݿ�2�����֣���Ϊ�˽�����һ���������ǿơ�����о��ɹ����߷����ڡ���о������о��ŶӶԺ��������κ�ɽ���βɼ��ĸ�����걾������������ʱ��������������̬�������ص������ݣ��걾�ֱ�����������ɺ�ɽ��ˮ��865m���Ϳ����պ�ɽ��ˮ��1332m�����о����֣������������ڱ�����̬�����������Լ���...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...